C. LES SONDEURS METEOROLOGIQUES ET
LE TRAITEMENT DE LEURS DONNEES
Résumé — Les modèles de prévision numérique des météorologues requièrent la connaissance à grande échelle des profils de température et d'humidité de l'atmosphère. Les mesures nécessaires à l'obtention de ces profils sont actuellement partiellement fournies par des sondeurs en infrarouge ou en micro-ondes, placés sur des satellites en orbite basse, comme TOVS sur NOAA. Après la description de ces sondeurs, nous présentons les satellites géostationnaires et en particulier le système Météosat. Les données recueillies par les sondeurs sont traitées par des algorithmes d'inversion qui procèdent de méthodes physiques ou statistiques. La méthode 3I du LMD est une méthode physico-statistique, qui utilise la banque TIGR de situations atmosphériques pour choisir une estimation initiale et qui fournit après des calculs réduits (le maximum de choses ayant été "précalculé") une estimation finale d'excellente qualité du profil réel de température de l'atmosphère. Dans les situations nuageuses, les micro-ondes apportent efficacement leur soutien aux sondeurs infrarouges.
Ce chapitre tente de répondre à trois questions :
– Que souhaitent connaître les météorologues ?
– Que font les satellites météorologiques actuels ?
– Comment traite-t-on les données que ces satellites nous envoient ?
1. LES DONNEES UTILES AUX METEOROLOGUES
L'un des problèmes majeurs de la météorologie actuelle est d'arriver à collecter des observations sur l'ensemble de la planète, en temps réel, et avec des degrés d'échantillonnage en rapport avec les échelles globales et locales des mouvements atmosphériques. On peut en gros diviser la surface de la Terre en trois parties [Bizzarri, 1979] :
– Les régions océaniques, qui requièrent un réseau d'observation avec une période d'environ 600 km ;
– Les zones continentales, où l'orographie diminue les échelles de variation des phénomènes et où une période de réseau d'environ 300 km est nécessaire ;
– Les zones à forte densité de population (essentiellement l'Europe, l'Amérique du Nord et l'Extrême-Orient), pour lesquelles des prévisions précises des précipitations et des vents demandent une période d'observation de l'ordre de 150 km.
Les stations de ces réseaux devraient mesurer les paramètres atmosphériques entre le sol et une altitude de quelque 30 km à des intervalles de 6 à 12 heures. Actuellement le nombre de stations de radiosondage est très insuffisant et leur distribution sur la terre est loin d'être optimale. Les chiffres cités concernent les besoins en matière de données d'entrée de modèles numériques de prévision ; bien entendu, certaines applications nécessitent des observations bien plus denses en temps et en lieu.
C'est là que les satellites peuvent pallier les insuffisances des réseaux terrestres en assurant une couverture globale de la Terre.
La tempête d'octobre 1987
D'autre part il apparaît clairement que les systèmes de prévision actuels sont limités ou déficients dans certaines circonstances exceptionnelles.
La tempête qui a ravagé la Bretagne et le sud-est de l'Angleterre dans la nuit du 15 au 16 octobre 1987 avait bien été entrevue dès le 12. Deux modèles numériques sur trois ("EMERAUDE" et "PERIDOT") plaçaient ensuite correctement le 14 et le 15 le centre de la dépression mais sous-estimaient sa valeur et la force des vents. Le troisième modèle, du Centre européen de prévision, prévoyait dès le 12 et confirmait le 13 la valeur très basse de la pression au centre de la dépression — environ 950 hPa pour la nuit du 15 au 16 —, mais la prévision du 14 n'indiquait plus que 980 hPa. Heureusement les spécialistes, après étude détaillée d'autres renseignements et aussi par manque de données d'altitude à partir du 14, ont maintenu le 15 l'avis de forte tempête lancé le 14 au matin. En résumé, les modèles ont permis de prévoir la tempête plusieurs jours à l'avance, mais n'avaient pas vu son aspect exceptionnel et étaient dangereusement optimistes à quelques heures du déchaînement éolien.
On peut en conclure que les modèles de prévision ont besoin d'être améliorés, qu'il convient de multiplier l'origine des données traitées et de réduire les périodes de renouvellement des observations, surtout pour pouvoir faire face correctement à un tel phénomène, exceptionnellement violent et évoluant rapidement ; d'autre part le développement des sondeurs micro-ondes sur satellites apporterait plus d'informations sur la structure atmosphérique sous des conditions nuageuses.
D'après Fischer [1979], des données essentielles pour les météorologues sont les profils verticaux de température et de vapeur d'eau :
– Pour l'observation en continu de l'état de l'atmosphère,
– Comme données d'entrée des modèles de circulation souvent utilisés pour la prévision du temps,
– Pour tester des modèles de climat encore en phase de développement.
2. LES SATELLITES METEOROLOGIQUES ACTUELS
2.a. Les satellites à défilement
Par rapport aux satellites géostationnaires, les satellites à défilement ont pour avantages principaux une meilleure résolution spatiale, la possibilité d'observer les régions de haute latitude et un lancement moins coûteux.
Le 1er avril 1960 fut lancé par les Etats-Unis le premier satellite météorologique : TIROS (Television and InfraRed Observation Satellite). La série des TIROS fut suivie par les ESSA (Environmental Satellite Service Administration), puis par les ITOS (Improved TIROS Operational System) et enfin par la série actuelle des NOAA (National Oceanic and Atmospheric Administration) [Schnapf, 1985]. TIROS-N, un nouveau TIROS, fut lancé en 1978 après NOAA-5, puis les satellites suivants reprirent les noms NOAA-6 à 11. Sont en opération actuellement NOAA-10 et NOAA-11, ce dernier ayant été lancé en septembre 1988. Il semble, pour compliquer encore un peu plus, que l'on énumère quelquefois ces satellites avec des lettres : on parle par exemple du satellite futur NOAA-K, qui sera lancé en 1992 ou plus tard.
Les Soviétiques ont leur propre système de satellites à défilement : la série des Meteor.
Les satellites NOAA ou leur orbite sont quasi polaire, circulaire, héliosynchrones. ils franchissent ainsi toujours aux mêmes heures un cercle de latitude donnée : 19h30 (nœud ascendant) et 7h30 (nœud descendant) pour les passages au-dessus de l'équateur des satellites NOAA pairs (6, 8, 10), 14h30 et 2h30 pour les satellites impairs. Ces horaires sont à peu près les mêmes pour toutes les latitudes modérées : il y a typiquement moins d'une heure d'écart avec l'équateur pour une latitude inférieure à 60°. La période orbitale est 102 minutes, l'inclinaison de l'orbite environ 99° et son altitude moyenne 850 km.
Dans les régions de moyenne latitude, chaque région du globe est vue par un tel satellite deux fois par jour, à 12 heures d'intervalle. Si deux satellites tournent en quadrature, comme c'est le cas actuellement, une région donnée est observée quatre fois en 24 heures.
Parmi les instruments transportés actuellement par les NOAA, ceux qui nous intéressent plus particulièrement sont les suivants (voir figure 1, citée par Wahiche [1984]) :
– Advanced Very-High-Resolution Radiometer (AVHRR) : radiomètre imageur dans les domaines visible et infrarouge ; les longueurs d'onde des cinq canaux (version complète) sont proches de 0,6 - 0,9 - 3,7 (la nuit) ou 1,7 (le jour) - 11 - 12 mm ; la résolution au sol est 1,1 km (au nadir).
– High-resolution Infrared Radiation Sounder (HIRS/2) : comprend 19 canaux dans l'infrarouge et un canal dans le visible.
– Stratospheric Sounding Unit (SSU) : comprend 3 canaux dans l'infrarouge vers 15 mm.
– Microwave Sounding Unit (MSU) : comprend 4 canaux vers 55 GHz.
Ces trois sondeurs constituent le TIROS Operational Vertical Sounder (TOVS). Le tableau A [Chédin et al., 1986 (b)] donne les caractéristiques spectrales (fréquences ou longueurs d'onde centrales) de tous les canaux. La figure 2 [Chédin et al., 1985 (a)] montre les figures de balayage, projetées au sol, des sondeurs HIRS/2 et MSU.
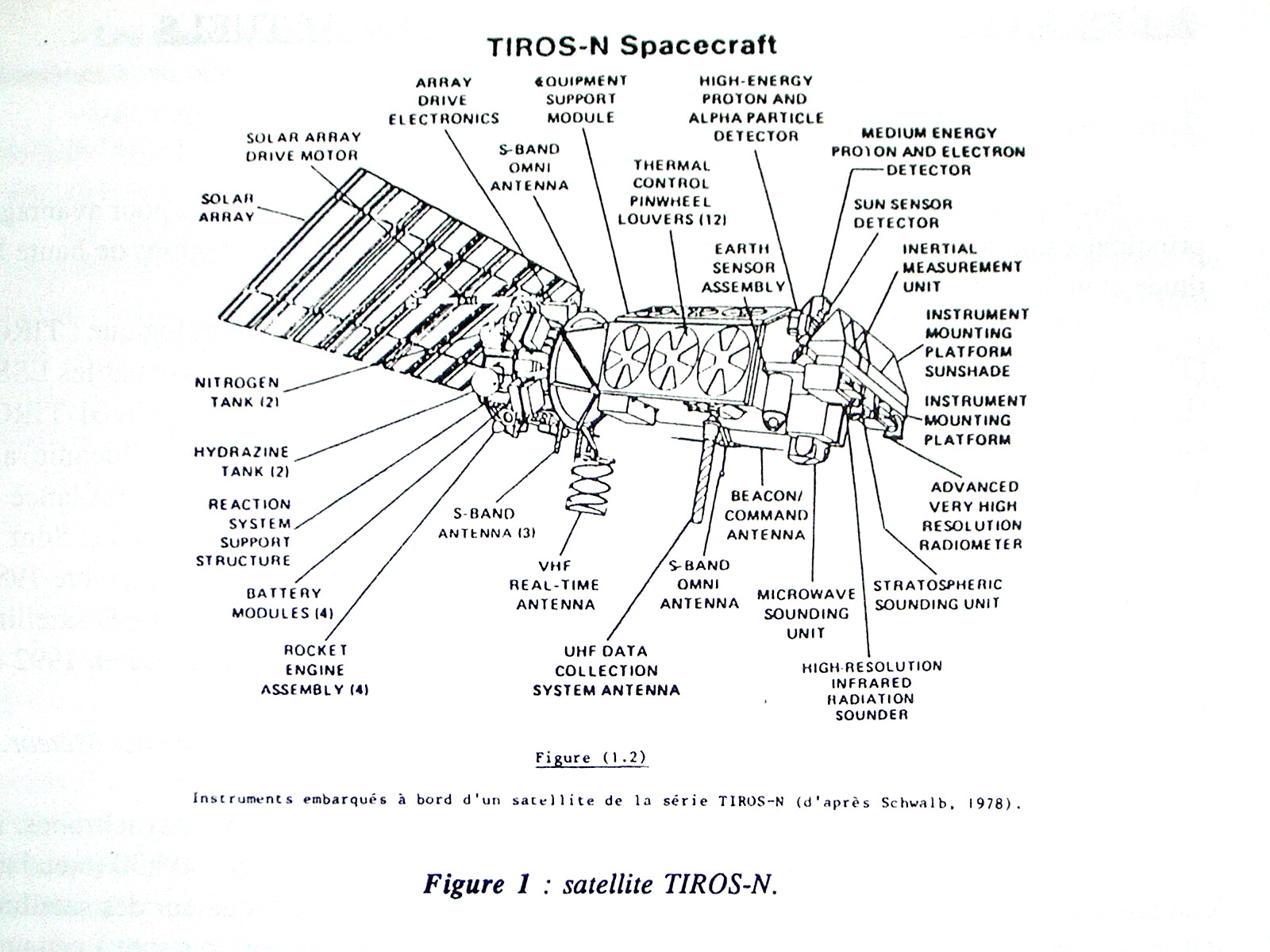
Figure 1 : satellite TIROS-N.
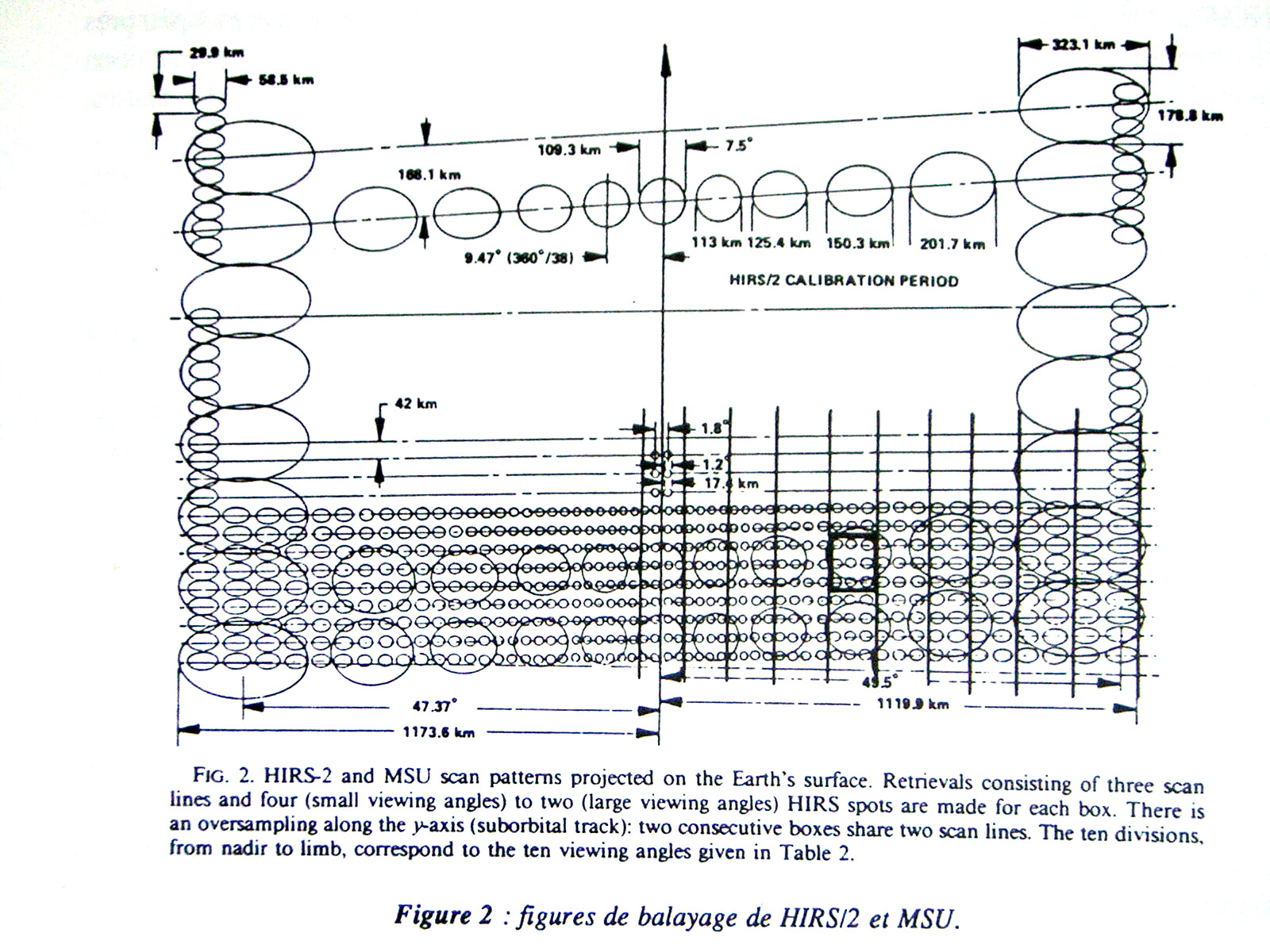
Figure 2 : figures de balayage de HIRS/2 et MSU.

Tableau A : caractéristiques des canaux de TOVS.
Les Etats-Unis ont développé un autre ensemble de satellites météorologiques, à des fins militaires. Le DMSP a lancé avant SSM/I la série des SSM/T, proches des MSU (voir le chapitre précédent) : sondeurs sur plusieurs satellites depuis 1979 [Curtis & Shipley, 1987] ; Gombert & McElroy [1985] décrivent quant à eux tout le système mis en place par le DMSP.
Notions de sondage et de fonction de poids
Ces sondeurs observent l'atmosphère surtout à des fréquences où celle-ci est opaque. Ces fréquences sont proches du centre d'une raie d'absorption d'un composant atmosphérique. Pour un canal donné, si sa fréquence est très proche du centre de la raie, les photons et donc l'information qu'il reçoit proviennent essentiellement du sommet de l'atmosphère, les autres photons ne parvenant pas au sommet car ils sont absorbés auparavant. Si, au contraire, sa fréquence est suffisamment éloignée du centre de la raie d'absorption, le canal verra plutôt les radiations en provenance du sol et des basses couches de l'atmosphère (cas d'un canal fenêtre ou quasi fenêtre). Dans un cas intermédiaire, les photons provenant du sol seront pour la plupart arrêtés par le bas de l'atmosphère ; les couches supérieures de l'atmosphère émettront bien des photons qui parviendront jusqu'au sondeur, mais en moins grande quantité que les photons provenant des couches médianes, qui constitueront donc le gros des radiations reçues par le canal.
On voit donc que l'on peut, suivant l'opacité de l'atmosphère pour une fréquence donnée, être informé sur une région particulière de l'atmosphère plutôt que sur une autre ou sur le sol (voir Prigent-Benoit [1988, pp. 16-17] pour une autre explication intuitive, mettant en jeu la différence de largeur d'une raie d'absorption avec la concentration du constituant concerné, donc avec l'altitude). La fonction de poids d'une fréquence d'un sondeur mesure la contribution de chaque couche élémentaire de l'atmosphère à la température de brillance totale. La figure 3 [Chédin et al., 1986 (b)] montre les fonctions de poids (en ciel clair évidemment) de TOVS. En ordonnée est portée la pression en millibars et en abscisse une unité arbitraire. Il est à remarquer que l'atmosphère est échantillonnée en altitude, par les fonctions de poids, plus ou moins régulièrement suivant les sondeurs. Le niveau (en millibars) du pic de chaque fonction de poids est indiqué dans le tableau A.
2.b. Les satellites géostationnaires
L'avantage majeur des satellites géostationnaires est leur aptitude à observer en permanence une grande région du globe. Ils ont donc comme première priorité la surveillance des situations météorologiques sévères (prévisions à court terme). Malheureusement pour cette surveillance il faudrait des sondages espacés typiquement de 1 km, alors qu'à une distance de la Terre 40 fois moins grande (satellites en orbite basse), et pour les prévisions numériques globales, on peut se contenter de sondages à des résolutions de quelque 50 à 100 km : c'est bien dommage, car la résolution des sondages est bien meilleure en orbite basse qu'en orbite géostationnaire, à cause de la distance moins grande [Pyke, 1987].
Cinq satellites permettent de contrôler correctement toutes les régions de la Terre de latitude inférieure à 50° nord ou sud : voir la figure 4 [Bizzarri, 1979] où les pointillés marquent les lieux pour lesquels l'angle de site est égal à 22°.
Le programme Météosat [Tessier, 1989], projet français à l'origine, fut "européanisé" en 1972 et vit ses premiers succès avec le lancement de Météosat-1 le 23 novembre 1977 et de Météosat-2 par Ariane (pour son troisième vol d'essai) le 19 juin 1981. Le 15 juin 1988, pour le premier vol d'une fusée Ariane 4, fut mis en orbite le troisième satellite "préopérationnel", Météosat-3 (ex-Météosat-P2). Le programme Météosat opérationnel (MOP) et la convention Eumetsat furent signés en 1983 ; l'organisation intergouvernementale Eumetsat (Organisation européenne pour les satellites météorologiques) doit, depuis 1986, "établir, entretenir et exploiter les systèmes de satellites météorologiques opérationnels" [Morgan, 1987]. Le premier satellite opérationnel, MOP-1 (rebaptisé Météosat-4), a été lancé le 6 mars 1989 et doit être suivi par deux autres exemplaires avant 1995.

Figure 3 : fonctions de poids "normalisées" de TOVS.
La position nominale du satellite Météosat courant est 0° de longitude (au-dessus du golfe de Guinée). D'autres satellites similaires sont censés couvrir le reste de l'orbite (figure 5 [esa, 1987 (b)]) : GOES East et GOES West (Geostationary Operational Environmental Satellite) pour les Etats-Unis, GMS (Geostationary Meteorological Satellite) pour le Japon sont opérationnels ; le satellite soviétique GOMS (Geostationary Operational Meteorological Satellite) doit occuper la cinquième position, près de INSAT (Indian Meteorological Satellite), qui lui est (ou était ?) placé à 74° est 1.
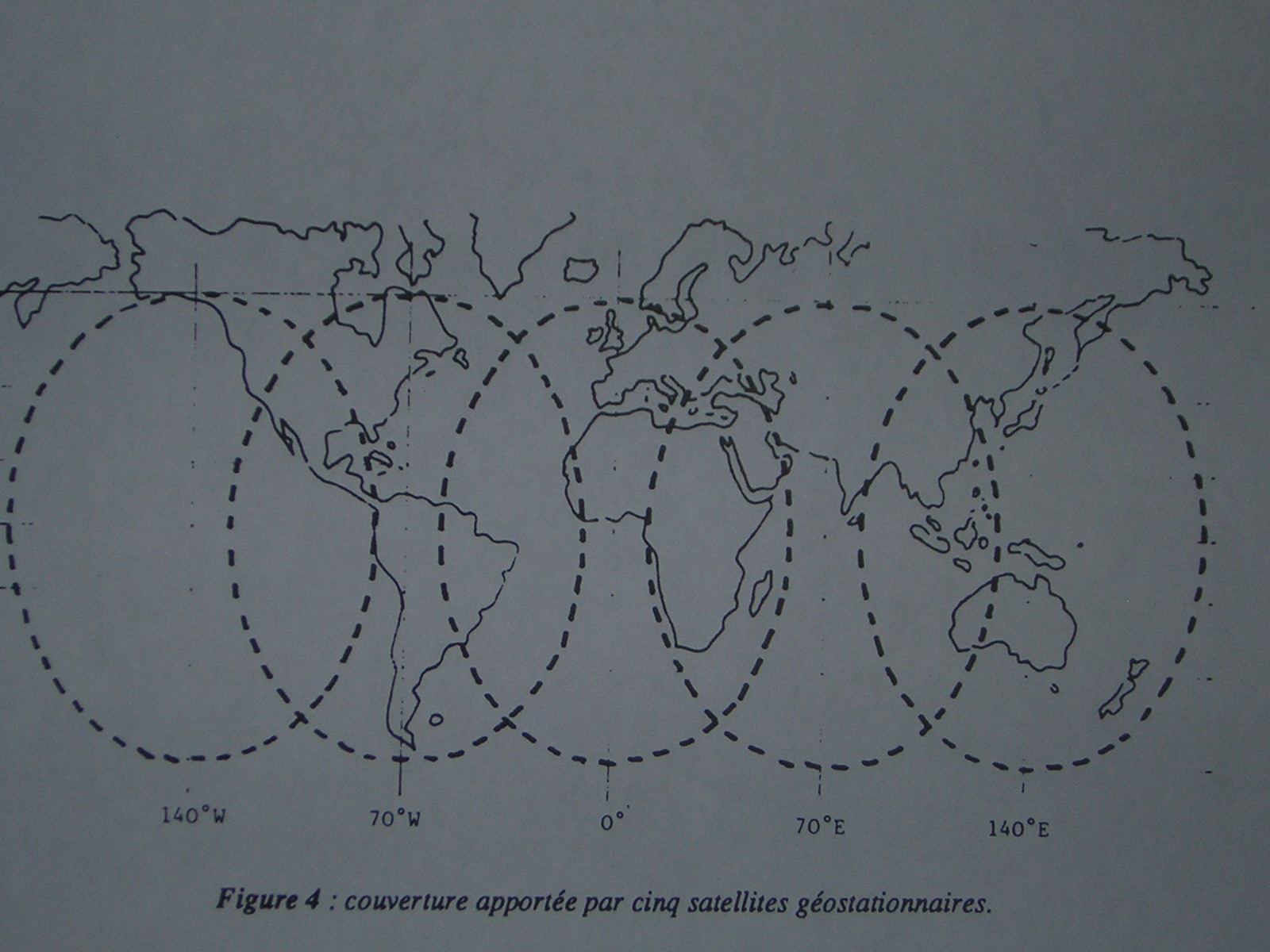
Figure 4 : couverture apportée par cinq satellites géostationnaires.
Quelques caractéristiques de GMS, GOES et Météosat sont indiquées sur le tableau B [esa, 1987 (b)].
Le canal infrarouge (IR) de Météosat est un canal fenêtre mesurant l'émission thermique de la surface et des nuages, alors que le canal vapeur d'eau (WV) mesure l'émission thermique des couches moyennes et hautes de la troposphère, absorbée par les molécules de vapeur d'eau.
En 1980 GOES-D (ou GOES-5 ?) emporta, avec les autres instruments de la mission, le Visible Infrared Spin Scan Radiometer (VISSR) Atmospheric Sounder (VAS). Cet instrument comporte 12 canaux infrarouges (peut-être 19 pour les GOES-Next des années 1990) et constitue le premier sondeur géostationnaire important. Bien sûr il est incapable de fournir des profils de température et de vapeur d'eau dans les régions nuageuses, contrairement à un sondeur micro-onde.
(Note de bas de
page)
1 : En 1979 un autre satellite GOES, identique aux deux autres mais pris en charge par l'Agence spatiale européenne, fut en opération au-dessus de l'océan Indien.

Figure 5 : position des satellites météorologiques géostationnaires.

Tableau B : caractéristiques des satellites géostationnaires météorologiques.
2.c. Résumé des observations météorologiques par satellites
La liste suivante [Bizzarri, 1979 ; Tessier, 1989] comporte les observations qui sont d'ores et déjà de valeur opérationnelle et celles qui ont de bonnes chances de le devenir dans un avenir très proche.
– Analyse des nuages : étendue, forme, altitude du sommet, présence de glace.
– Profils atmosphériques : température, humidité, ozone.
– Vents (à partir du déplacements des nuages).
– Surface de la mer : température, état.
– Terre : température, humidité.
– Humidité dans la haute troposphère.
– Neige et glace : étendue, âge.
– Précipitations (surtout sur la mer).
– Bilan radiatif entre la Terre et son atmosphère et l'espace.
3. L'OBTENTION DES PROFILS ATMOSPHERIQUES
Cette section est importante car elle constitue à la fois une introduction et une justification pour le travail qui est présenté par la suite.
3.a. Principes
Nous allons nous intéresser surtout au profil de température. La figure 6 montre un profil typique de température de l'atmosphère entre 0 et 100 km et la figure 7 entre 0 et 700 km [Valley, 1965]. C'est un tel profil (on se contente généralement des 20 premiers kilomètres ou un peu plus) qu'il va s'agir de retrouver à partir des observations par satellite. Un algorithme permettant de réaliser cette opération s'appelle un modèle inverse (on parle aussi "d'inversion" de l'équation de transfert, c'est-à-dire de sa résolution) par opposition à un modèle direct qui est un algorithme grâce auquel on calcule une "réponse" (facteur de transmission, température de brillance vue d'un satellite) suivant les variables diverses qui définissent l'état de l'atmosphère. Il faut remarquer que bien souvent l'efficacité d'un modèle inverse dépend grandement de l'exactitude du modèle direct qui peut lui être associé. Un des buts de cette thèse a été de construire un modèle direct suffisamment précis (partie II).
L'expression reliant la température de brillance, vue à la sortie d'un système, aux variables décrivant ce système, s'appelle l'équation de transfert. Dans cette équation, présentée en détail au chapitre II.A, intervient évidemment, et de façon très complexe, le profil de température. Cette complexité, conjuguée à d'autres facteurs tels que les erreurs qui accompagnent les mesures, font de l'inversion de l'équation de transfert un problème particulièrement ardu.

Figure 6 : profil de température de l'atmosphère entre 0 et 100 km
(U. S. Standard Atmosphere) ;
les noms des couches et de leurs frontières sont adoptés par l'Organisation
météorologique mondiale.
L'inversion de l'équation de transfert est d'autant moins difficile que le nombre de paramètres inconnus est réduit. En particulier, pour la température, on choisit de sonder l'atmosphère dans une raie d'absorption d'un corps dont la distribution en altitude est constante (plus précisément, dont la densité par rapport à l'air ambiant est constante avec l'altitude jusqu'à une hauteur "suffisante"). CO2 (souvent vers 15 mm, voir le tableau A) ou N2O sont favoris pour l'infrarouge ; O2 pour les micro-ondes. Voir la figure II.B.-1, qui montre la densité des principaux constituants de l'atmosphère entre le sol et 250 km.

Figure 7 : profils de température, pression, densité et masse moléculaire
jusqu'à 700 km d'altitude (U. S. Standard Atmosphere 1962).
3.b. Méthodes d'inversion
Traditionnellement, c'est Kaplan [1959] qui est cité comme étant le premier à avoir discuté des possibilités offertes par le sondage passif de l'atmosphère terrestre depuis l'espace, en particulier l'estimation de profils de température à partir d'observations de CO2 dans l'infrarouge. Meeks & Lilley [1963] ont été les premiers à envisager l'obtention de ces mêmes profils par des observations passives en micro-ondes.
Les techniques d'inversion de l'équation de transfert sont décrites mathématiquement en détail par Ulaby et al. [1986]. La résolution rigoureuse du problème repose sur l'étude de l'équation de Fredholm de première espèce [Wahiche, 1984]. Nous nous contenterons ici de faire une présentation méthodologique et synthétique, très largement inspirée par Chédin et al. [1985 (a)], des types d'inversion habituellement utilisés.
Les procédures d'inversion statistiques sont les plus couramment employées, surtout de l'autre côté de l'Atlantique. Ainsi les données délivrées par TOVS sont analysées de façon opérationnelle par le NESDIS (National Environmental Satellite, Data, and Information Service) de la NOAA. La procédure utilise des relations statistiques entre les brillances mesurées et les profils de température. Ces relations sont déduites à partir d'analyses (régression linéaire multiple) de gros catalogues de brillances observées auparavant et de données associées de radiosondage 1.
Les avantages majeurs de ce genre de méthode sont :
– Sa rapidité : pas de longs calculs sur l'équation de transfert ;
– Sa relative souplesse : de petites modifications des réponses de l'instrument peuvent être compensées par une mise à jour des coefficients de régression.
Mais les inconvénients sont loin d'être négligeables :
– L'applicabilité de l'ensemble statistique à la situation particulière à considérer est quelquefois douteuse, surtout dans le cas d'une situation extrême ;
– Il est difficile de prendre en compte correctement la dépendance des brillances observées avec des paramètres physiques variés autres que le profil de température, comme les conditions de surface.
Un autre grand domaine est constitué par les méthodes physiques d'inversion. On résout l'équation de transfert radiatif itérativement jusqu'à ce qu'un bon accord soit obtenu entre les brillances observées et calculées. Les deux inconvénients principaux des méthodes statistiques sont réduits mais deux nouveaux problèmes apparaissent :
– A chaque étape de l'itération il faut recalculer les facteurs de transmission et les brillances, ce qui laisse l'alternative d'élaborer des codes (modèles directs) rapides et donc peu précis ou de dépenser beaucoup de temps de calcul — alors que l'on souhaite fournir aux météorologues des données en temps réel ;
– La solution finale donnée par l'algorithme est souvent fortement dépendante du choix initial, nécessaire comme donnée d'entrée pour la première itération.
Le Laboratoire de Météorologie Dynamique (LMD) a développé une méthode "physico-statistique" dont la description est l'objet des paragraphes suivants.
3.c. La méthode 3I
Cette méthode est décrite avec précision par (entre autres) Chédin et al. [1985 (a) et 1988 (a)], Chédin & Scott [1986], ou encore Flobert [1988] et Claud [1989]. Nous reprenons ici quelques idées et développements de ces écrits.
La procédure 3I (Improved Initialization Inversion) est fondée sur le calcul une fois pour toutes d'une banque de données atmosphériques, très riche, qui est utilisée pour fournir un point de départ — des conditions initiales — qu'on suppose suffisamment proche de la solution exacte. On peut alors se contenter, dans la phase d'inversion, d'une seule étape pour estimer cette solution. On a ainsi évité les inconvénients inhérents aux méthodes physiques et statistiques.
La résolution spatiale choisie pour la procédure 3I est de l'ordre de 100 x 100 km2. Ce choix est le résultat d'un compromis entre les résolutions des deux sondeurs qui sont utilisés (MSU et HIRS/2). Il y a d'autre part un "suréchantillonnage" dans la direction de déplacement du satellite : une inversion est réalisée tous les 100 x 30 km2. Une des "boîtes" qui sont constituées en vue de l'inversion est apparente sur la figure 2.
La banque TIGR
La banque de données TIGR (TOVS Initial Guess Retrieval 2) comprend, pour différentes conditions d'observation possibles (10 angles de visée, 11 ou 19 pressions de surface, terre ou mer) et pour 1207 situations atmosphériques couvrant le globe entier, les profils de transmission (facteur de transmission de chaque "couche" de l'atmosphère, voir chapitre II.A) et les températures de brillance associées de tous les canaux de TOVS, et les dérivées partielles de ces températures de brillance par rapport à la température et à l'humidité (matrices jacobiennes).
La description des situations atmosphériques archivées dans la banque TIGR est issue de radiosondages. Les transmissions et les températures de brillance sont calculées par le modèle direct 4A : Automatized Atmospheric Absorption Atlas [Scott & Chédin, 1981].
L'estimation initiale, donnée d'entrée de l'inversion, est choisie comme étant la situation la plus proche (ou une moyenne des situations les plus proches) de l'état observé, c'est-à-dire de l'ensemble des brillances fournies par les canaux des sondeurs. La distance di, obs entre la situation i et l'état observé obs est définie par :
 (1) [Note :
= Σ]
(1) [Note :
= Σ]
n : nombre de canaux considérés
T(k) : températures de brillance pour le canal k
sk : variance de T(k) pour l'ensemble des situations "candidates".
La figure 8 [Chédin et al., 1985 (a)] présente l'organisation de la banque TIGR et son utilisation dans le processus général d'inversion.
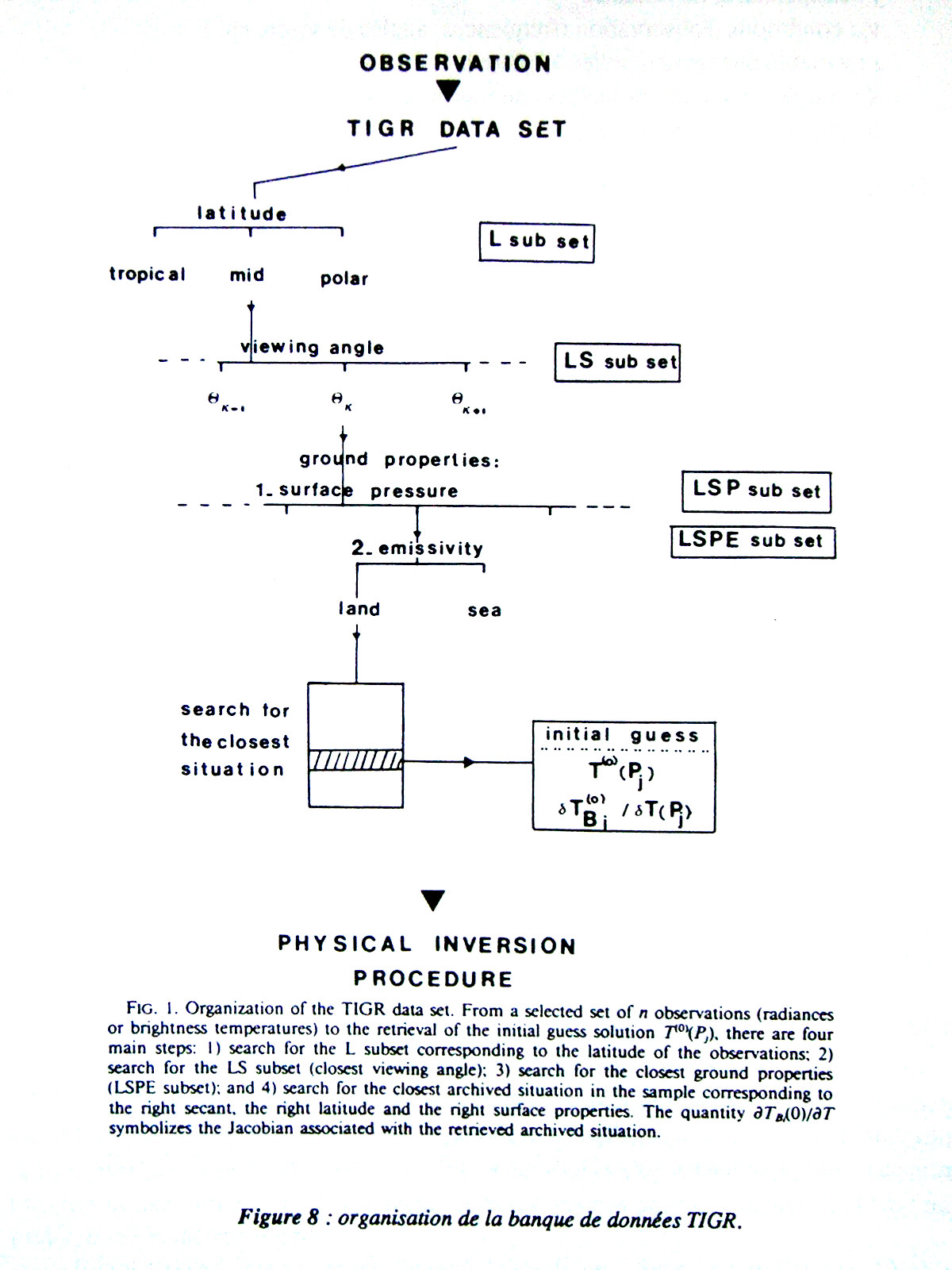
Figure 8 : organisation de la banque de données TIGR.
L'inversion proprement dit
L'équation de transfert radiatif peut s'écrire comme une équation de Fredholm de première espèce :
![]() (2)
(2)
y : températures de brillance
ni : conditions d'observation (fréquences, angles de visée, etc.)
z : variable directement reliée à l'altitude
X : "noyau" incluant les facteurs de transmission
b : températures atmosphériques.
Un modèle linéaire approprié permet d'écrire, de façon matricielle :
ye = Xb + e (3)
ye = y + e
e : erreur associée.
On peut montrer que, b0 et y0 étant les valeurs moyennes de b et y, Se et Sb étant les matrices de covariance de e et b, et le symbole ' désignant la transposition, l'estimateur du maximum de vraisemblance (a posteriori) de b est :
bMAP = b0 + [X'Se-1X + Sb-1]-1X'Se-1(ye – y0) (4)
Après quelques étapes de raisonnement, utilisant en particulier le fait que l'estimation initiale est très proche de la situation observée, on aboutit à :
bMAP = bIG + [X'Se-1X + Sb*-1]-1X'Se-1(ye – yIG) (5)
bIG : estimation initiale ("initial guess solution") associée à yIG
b* = bMAP – bIG
Sb* : matrice de covariance de b*.
La matrice Sb* peut être facilement calculée à partir de la banque TIGR.
Rappelons que l'on se contente de la solution obtenue après une seule étape d'une virtuelle itération (étape qui vient d'être résumée) ; il y a une seule phase d'inversion de matrices.
La limite de résolution verticale du profil obtenu est directement liée au nombre de canaux utilisés pour l'inversion (voir figure 9).
Application de l'algorithme 3I
La procédure 3I a été appliquée pour la première fois à l'expérience ALPEX (ALPine EXperiment) IOP (Intensive Observing Period) des 4 et 5 mars 1982, à partir des données du satellite NOAA-7. Les résultats de la comparaison entre les profils calculés par 3I et ceux fournis par les radiosondages sont résumés sur la figure 9 [Chédin et al., 1985 (a)].

Figure 9 : précision de 3I.
L'accord est excellent pour le bas de la troposphère, meilleur en tout cas qu'avec l'algorithme opérationnel du NESDIS (comparer la figure 10 avec les figures données par Drahos et al. [1987], où l'erreur quadratique moyenne est presque toujours supérieure à 2 K — cependant les situations atmosphériques sont différentes). En revanche, vers la tropopause (200 ou 300 mb), la qualité de l'estimation des profils extraits est moindre, comme c'est souvent le cas avec d'autres algorithmes d'inversion.
(Notes de bas
de page)
1 : Cette procédure n'est peut-être plus employée par le NESDIS à l'heure actuelle.
2 : Donc, in extenso : Television and InfraRed
Observation Satellite-N Operational Vertical Sounder Initial Guess Retrieval
data set.
3.d. Le problème des nuages et l'importance des micro-ondes
Toute la description précédente est parfaitement valide lorsqu'on l'applique à des régions non nuageuses. Les choses se compliquent grandement si l'on cherche à obtenir des profils pour des zones couvertes : certains canaux infrarouges sont "contaminés" et l'on ne peut pas utiliser directement les données correspondantes pour l'inversion. Le LMD traite le problème de la façon suivante.
Il faut d'abord déterminer les "boîtes" "non-claires". Sept tests statistiques [Wahiche et al., 1986], portant par exemple sur des différences de température de brillance entre canaux, sont appliqués à chaque "spot" de chaque boîte. Un spot est déclaré clair s'il passe tous les tests. Une boîte est claire si elle comporte au moins un spot clair.
Dans une deuxième étape, on recherche l'estimation initiale du profil à partir d'une base restreinte de canaux, en principe insensibles aux nuages : les canaux infrarouges qui sondent le haut de l'atmosphère et les canaux micro-ondes.
On lance alors l'algorithme de "décontamination", fondé sur la méthode y [Chédin et al., 1985 (a)]. Pour un canal infrarouge contaminé, une température de brillance "éclaircie" est obtenue en ajoutant à la valeur de l'estimation initiale fournie par TIGR la différence entre les valeurs observée et estimée d'un canal micro-onde dont la fonction de poids est semblable à celle du canal infrarouge considéré. Cette méthode est différente de la méthode N* du NESDIS, qui, pour éliminer l'effet des nuages, compare les valeurs mesurées des brillances d'un même canal contaminé sur au moins deux spots, en supposant que la différence entre les spots vient seulement de la variation quantitative de la couverture nuageuse.
On voit donc tout l'intérêt du couplage de sondeurs infrarouges et micro-ondes. Les micro-ondes sont indispensables dès que les nuages apparaissent, et ce sont justement les zones de perturbation qui sont les plus intéressantes à bien connaître. L'utilisation de l'infrarouge permet de disposer de nombreux canaux de sondage, et de retrouver les profils atmosphériques avec une bonne résolution spatiale, à la fois verticale et horizontale.
Nous avons présenté un exemple du traitement de l'information issue de TOVS. Il y aurait naturellement beaucoup d'autres travaux à décrire parmi ceux déjà cités à la fin de la section 2. A propos de 3I, signalons qu'une fois que la structure thermique de l'atmosphère est obtenue en trois dimensions, on peut en déduire les champs de vents thermiques [Chédin et al., 1986 (a et b)].
Sommaire Précédent Suivant Accueil